اندازه گیری و نظارت بر دما، سرعت و لرزش انواع موتورهای الکتریکی
الکتروموتورها یکی از پرکاربرد ترین و اساسی ترین تجهیزات صنعتی هستند که به جرات می توان گفت در تمامی صنابع حضوری ضروری دارند. وظیفه اصلی الکتروموتورها،تولید نیروی حرکتی دورانی و حتی نیروی حرکتی خطی در سرعت ها و گشتاور های مختلف می باشد. از نیروی حرکتی تولید شده توسط الکتروموتور برای راه اندازی انــــواع میکسر ها، نوار نقاله ها، خنک کننده ها، کمپرسورها، پمپ ها و … استفاده می شود. در بسیاری از موارد کاربردی در صنعت، الکتروموتورها در مدت زمان طولانی و به صورت پیوسته کار می کنند و در معرض عوامل استهلاکی مختلفی مانند سایش قطعات، بار اضافی، وجود مانع و نیروی اصطکاک حرکتی و بالا رفتن دما و …. هستند. برای اطمینان از عملکرد صحیح الکتروموتور و همچنین پایداری عملکرد و عمر طولانی آن لازم است تا وضعیت عملکرد و سلامت الکتروموتور به صورت پیوسته پایش شود.
مکانیزم های مختلفی برای پایش وضعیت الکتروموتورها وجود دارد که در ادامه ۴ مورد آن معرفی و بررسی می شوند:
- اندازه گیری لرزش
- اندازه گیری انرژی مصرفی
- اندازه گیری دما
- اندازه گیری سرعت دوران
اندازه گیری لرزش موتور الکتریکی
اندازه گیری لرزش در کنار اندازه گیری دما روشی استاندارد و مقرون به صرفه برای پایش وضعیت فن ها و الکترو موتورها است که با هدف جلوگیری از آسیب دیدگی آن ها، پایداری عملکرد و عمر طولانی، پایین آوردن استهلاک و هزینه های تعمیر و نگهداری موتور و در نهایت حفاظت از ایمنی فرایند های صنعتی، ضروری خواهد بود. برای اندازه گیری لرزش انواع الکترو موتور می توان از سنسورهای لرزش مطلق یا Absolute استفاده نمود. این نوع سنسورهای لرزش عموما از نوع پیزوالکتریک هستند و معمولا روی پوسته انواع موتور و فن نصب می شوند.
در صورت بروز خطا هایی مانند اضافه بار یا اصطکاک یا مثلا گرفتگی لوله های انتقال (برای پمپ ها)، دوران شفت موتور با لرزش همراه خواهد بود. بروز این لرزش باعث آسیب دیدگی شفت و سایر اجزای موتور مانند یاتاقان ها شده و علاوه بر این، وجود اصطکاک در دوران شفت روتور، باعث افزایش جریان مصرفی موتور و داغ شدن آن می شود.
بهترین نقطه برای نصب سنسورهـــای اندازه گیری لرزش، یاتاقان های الکترو موتور هستند. یاتاقان ها از آن جایی که تکیه گاه دوران شفت نیز هستند، دارای دمای بیشتری نسبت به نقاط دیگر موتور بوده و همچنین لرزش شفت بیشتر از همه در این نقاط امکان بروز آسیب دیدگی را فراهم می کند. سیستم هــای حرفه ای و اختصاصی مانیتورینگ لرزش مانند سیستم AMS 6500 ATG برای فرایند هایی که در آن ها تعداد اندازه گیری ها پایین است، گزینه های مقرون به صرفه ای نخواهند بود. بنابر این به صرفه تر خواهد بود تا با یکپارچه سازی مجموعه ای از سنسورهای لرزش و ماژول های تقویت کننده سنسور، سیستم مورد نیاز برای پایش وضعیت موتور، تجمیع شود.

در راه حل پیشنهادی شرکت برگ سنسورهای لرزش پیزو الکتریک برند PCH دانمارک، در اتصال با ماژول های رله کنترلر یونیورسال PR 4116 قرار خواهند گرفت. ماژول PR 4116 دارای یک خروجی آنالوگ و ۲ خروجی رله است. خروجی آنالوگ این ماژول را می توان برای مقاصد کنترل یا مانیتورینگ به سمت PLC یا DCS ارسال نمود. رله خروجی ماژول PR 4116 را می توان برای ست پوینت های مختلف تنظیم و پیکربندی کرد.

برای انجام فرایند حفاظت از الکترو موتور لازم است مقادیر غیر مجاز و خطرناک لرزش انتخاب شوند. با انتخاب حد آستانه غیر مجاز لرزش به عنوان ست پوینتِ، برای رله خروجی ماژول PR 4116، در صورت رسیدن لرزش به حد غیر مجاز، رله خروجی فعال شده و موتور متوقف می شود. لازم به ذکر است که در تنظیم رله خروجی ماژول PR 4116 پارامترهایی مانند هیسترزیس و زمان های تاخیر را نیز می توان تعریف نمود تا کنترل عملکرد موتور با دقت بیشتری انجام شده و همچنین از توقف های ناخواسته جلوگیری شود.

به طور مثال برای حفاظت از یک الکترو پمپ در مقابل لرزش، اگر زمان تاخیر فعال شدن رله در تنظیمات ماژول PR 4116 به میزان ۵ ثانیه انتخاب گردد، در صورتی که لرزش موتور از حد غیر مجاز عبور کرد و به مدت ۵ ثانیه در محدوده خطرناک باقی ماند، رله خروجی فعال شده و الکترو موتور خاموش می شود. لازم به ذکر است که در صورت انفجاری بودن محیط به جای ماژول PR 4116 باید از ماژول رله کنترلر ضد انفجار PR 9116 استفاده نمود.

اندازه گیری انرژی مصرفی
جریان جاری در سیم پیچ های الکتروموتور منبع اصلی نیروی محرک موتور است. همچنین مقاومت سیم پیچ ها و حـــرارت ناشی از این مقاومت هم یکی از عوامل اصلی اتلاف انرژی موتور می باشد. در مواردی مانند وجود اضافه بار یا وجود مانع و یا نیروی اصطکاک در دوران شفت روتور، جریان بیشتری در سیم پیچ ها جـــــاری می شود تا گشتاور لازم تولید گردد. برای اطمینان از عملکرد صحیح موتور و حفاظت از سیم پیچ ها که اجزای حیاتی موتور هستند و همچنین جلوگیری از آسیب دیدگی ناشی از اضافه بار، لازم است تا وضعیت سیم پیچ های موتور پایش شود.
وضعیت سیم پیچ های موتور به دو طریق قابل پایش است. اندازه گیری جــــــریان جاری در سیم پیچ و اندازه گیری دمـــــــای سیم پیچ. برای اندازه گیری جریان سیم پیچ های الکتروموتور، مبدل AC به DC مدل PR 4179 پیشنهاد می شود. این مبدل قابلیت تبدیل مقدار RMS جریان یا ولتاژ الکتریکی به سیگنال جریان یا ولتاژ DC را دارا می باشد. مبدل PR 4179 علاوه بر این در ساختار داخلی خود و مابین ترمینال های ورودی، خروجی و تغذیه تا سطح ۲۶۰۰ ولت ایزولاسیون دارد. بدین ترتیب مبدل PR 4179 در واقع یک ایزولاتور هم هست و با بکارگیری آن نویز های ناشی از کارکرد موتور در محیط و امواج الکترومغناطیسی نیز از سیگنال خروجی حذف می شود.

اندازه گیری دما
برای اندازه گیری دمای موتور، مبدل یونیورسال PR 4114 پیشنهاد می شود. این ترانسمیتر دارای زمان پاسخ کمتر از ۱ ثانیه و دقت 0.1% بوده و با کمک آن می توان در بازه طولانی مدت و به صورت پایدار دمای موتور را پایش نمود.

اندازه گیری سرعت
سرعت دوران موتور پارامتر کلیدی در تشخیص عملکرد استاندارد آن است. بالا رفتن سرعت موتور از محدوده مجاز باعث بروز آسیب جدی به قطعات متحرک و ثابت مانند روتور و یاتاقان ها می شود. برای اندازه گیری سرعت دوران روتور می توان از یک سنسور مجاورتی یا proximity و مبدل فرکانس PR 4225 استفاده نمود. مبدل فرکانس PR 4225 قابل اتصال به انواع سنسورهای دیجیتال مانند TTL, NPN, PNP و تاکو متر و NAMUR بوده و فرکانس در بازه ۰ الی ۱۰۰ کیلو هرتز را به سیگنال DC استاندارد مانند جریان ۴ تا ۲۰ میلی آمپر تبدیل می کند.

علاوه بر این و برای فرایند های حساس تر و پیچیده تر که توقف ناخواسته موتور باعث بروز هزینه در تولید می شود و ریسک های اندازه گیری باید به دقت مورد مطالعه قرار بگیرند، استفاده از سیستم حفاظت در برابر سرعت ۲ از ۳ یا 2oo3 پیشنهاد می شود. این سیستم مبتنی بر رله کنترلر های PR 4131 بوده و مطابق با مکانیزم آن، ۳ سنسور اندازه گیری سرعت در نقاط مختلف اطراف روتور و چرخ دنده ها نصب می شود و در صورتی که سرعت اندازه گیری شده توسط ۲ سنسور از ۳ سنسور (فرقی نمی کند کدام ۲ سنسور) بیشتر از حد مجاز تعیین شده باشد، سرعت موتور غیر مجاز تفسیر شده و موتور متوقف می شود.
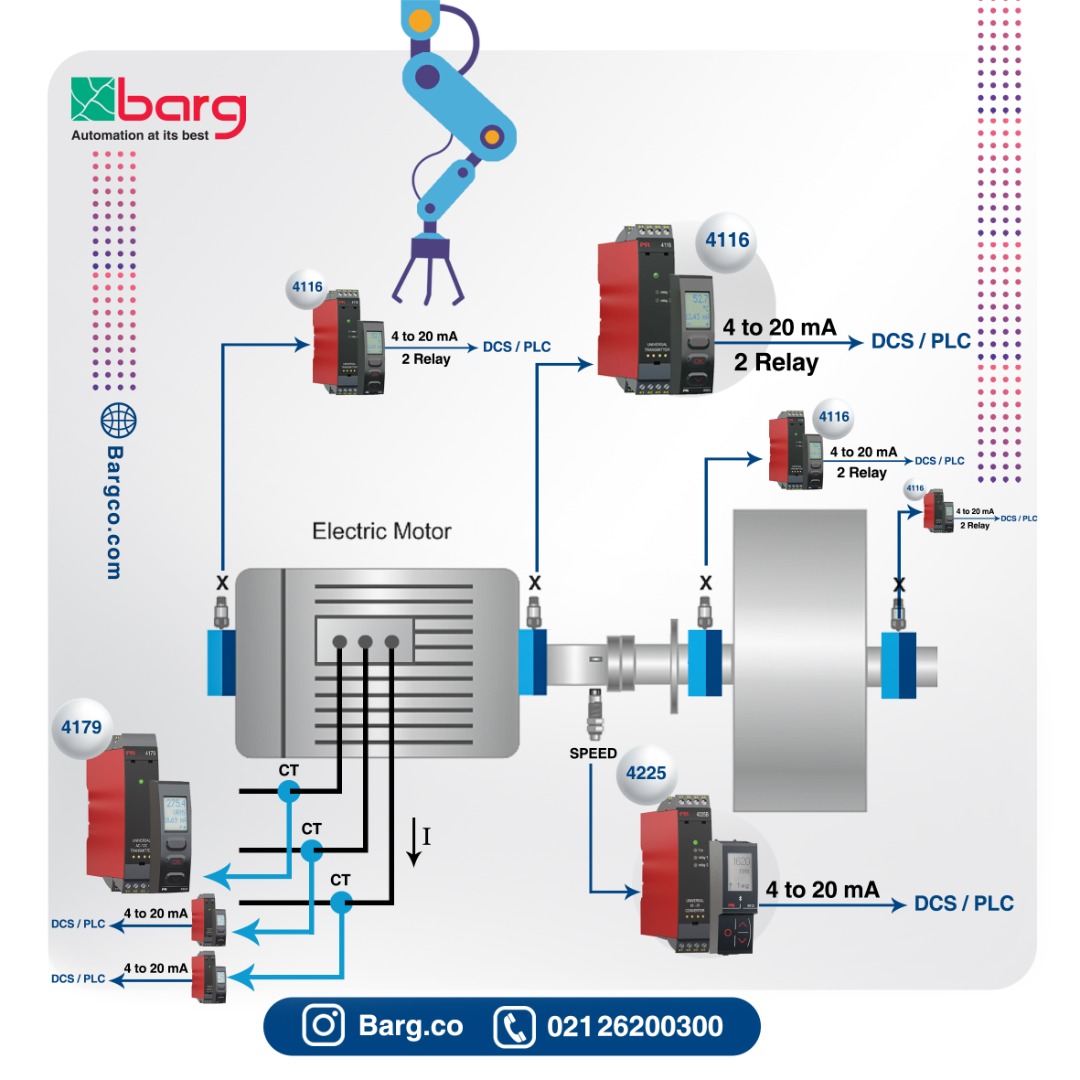
جهت درک بهتر راه حل های ذکر شده برای پایش وضعیت انواع الکتروموتور، به تصویر شماتیک زیر دقت کنید.

جمعی از مصرف کنندگان تجهیزات PR Electronics در صنایع کشور:
 |
آلومینای ایران: رله کنترلر یونیورسال |
 |
پتروشیمی ایلام: رله کنترلر یونیورسال |
 |
تولیدی شیمیایی کلران: مبدل سیگنال دو قطبی / تک قطبی و مبدل یونیورسال |
 |
سیمان تجارت مهریز: ایزولاتور و مبدل فرکانس |
 |
فولاد سیرجان ایرانیان: بریر و رله کنترلر |
 |
سیمان آبیک: مبدل یونیورسال و مبدل – رله کنترلر یونیورسال و مبدل – تقویت کننده یونیورسال |
 |
سیمان هرمزگان: مبدل یونیورسال و مبدل – رله کنترلر یونیورسال و ایزولاتور و مبدل فرکانس |
 |
کشت و صنعت سلمان فارسی: مبدل یونیورسال AC به DC |
 |
کشت و صنعت و روغن نباتی نازگل: مبدل یونیورسال AC به DC |
 |
صنایع مس شهید باهنر: مبدل سیگنال دو قطبی / تک قطبی و مبدل یونیورسال AC به DC |
 |
آلومینیوم پارس: مبدل یونیورسال و مبدل – تقویت کننده یونیورسال |